Six Axis High Flight Precision Drone Breakthrough Will Quickly And Quite Literally Takeover The World
Summary:
Six axis fully actuated drones can achieve sub 10mm flying precision in all axes even with varying external forces. With high power rapid response thrust in every degree of freedom they can actively hold steady against tool use, turbulence, and even hurricanes in real time. They are capable of extreme agility and enable close proximity flying and high density swarms. Traditional drones and aircraft, the equivalent of cars without brakes, will soon become antiquated. This breakthrough enables drones to have CNC machine like precision, tool use, and tool changing. They have sufficient precision to serve as flying platforms for robotic arms, including outdoor flying “humanoid” robots. They can range in size from grams to tens of metric tons and they are terrain independent. They can also achieve cargo transport costs comparable to trains but point to point at aircraft speeds. AI controlled six axis drones will scale extremely rapidly and take over manufacturing, construction, farming, forestry, logistics, mining, earth moving, and more - over half of global GDP in total. Military applications present an Oppenheimer moment… Coupled with AI they allow manufacturing plants, renewable energy systems, data centers, buildings, and most everything else to be constructed autonomously in days not months and at much lower cost. Six axis drones will enable much faster scaling of AI and are how AI will be monetized. They are worth ~10x what AI alone is currently worth and they will subsume AI. We are seeking low royalty open licensing of this new technology, and related advisory roles, in order to scale rapidly and extend the AI revolution into the physical world.

This minimum viable demonstration video shows a six axis drone constrained in roll, yaw, pitch, and x and free to move in y and z (lateral and vertical) with ultrasonic position sensors measuring lateral and vertical position with <10mm accuracy and fast poorly tuned control loops around lateral and vertical position only. Independent flight would require accurate position sensors in all degrees of freedom and some degree of AI control, somewhat akin to a flight weight self-driving sensing and control setup, which is a significantly more effort. Six axis drones require six fast control loops and six slow path planning control loops around every degree of freedom while people can only manually control up to around four slow control loops at once.
Primary advantages:
Six axis drones can achieve similar precision to humanoid robots while being ~10x faster, ~10x longer lived, ~10x greater range, ~2x the payload fraction, terrain independent, third dimension capable, lower cost, scalable from grams to tens of metric tons, able to hold and operate tools directly, and the list goes on. They surpass humanoid robots on almost every major performance metric, including controllability, and will be much faster to develop, but they also combine this with much lower cost logistics - cargo costs comparable to trains but point to point at aircraft speeds. Six axis control turns drones into low-cost high speed pick and place machines that can operate over almost any distance in all three dimensions and three orientations, and in complex environments, scaling into the tens of metric tons if necessary. They can pick up and use almost any tool and they can pick up and assemble objects small and large at high speed. They can replace supply chains at all levels, including between machines in a factory, warehouses and high rise construction projects, farming fields and silos, mines and processing plants, and long distance logistics between countries. And they can operate in dense high speed swarms, surrounding and working on objects from all sides at once without affecting one another. They can transform one dimensional production lines into three dimensional additive and subtractive processes of arbitrary scale, indoors and outdoors. A 25kg six axis drone might have a 25kg payload, comparable to a humanoid robot, but be much faster and cost less than $1/h. Six axis drones will dominate manufacturing, construction, farming, forestry, logistics, mining, and even earth moving, potentially scaling to over 50% of global GDP. This is a far larger market than AI. Six axis drones will enable much faster scaling of AI, and critical energy systems, and are how we will monetize AI. With six axis drones scaling rates for everything increase dramatically.
Sensing and control:
Six axis drones require a fundamentally new and in some ways simpler brute force approach to aerodynamic control. Each of the six degrees of freedom has its own dedicated fast control loop and a much slower path planning control loop. This also necessitates absolute position sensing in every degree of freedom at a speed and accuracy commensurate with the desired flight precision. For example, RTK GPS which is capable of ~10mm accuracy under ideal situations and ultra wide band positioning systems might achieve similar accuracy indoors. GPS accuracy is expected to improve with the much larger satellite constellations coming online. Roll, pitch, and yaw absolute position sensing is also needed. In theory this could be accomplished with RTK GPS, a three axis magnetometer for an absolute Earth’s magnetic field vector, and a three axis accelerometer to back out the gravity vector. In practice a full sensor fusion approach is likely needed, perhaps including multiple RTK GPS receivers and IMUs displaced around the drone and other sensor systems comparable to those used for self-driving cars. One of the few impediments to rapid development of six axis drones is the development and scaling of these flight weight “self driving” sensors and control systems - this is why there is not currently a free flying demonstration.
Traditional aircraft, including airplanes and helicopters, directly control four degrees of freedom and through them control the remaining two degrees of freedom at a much slower rate. This substantially limits control and flying precision. A large part of the reason for this is that human beings can not effectively stabilize and control more than four external degrees of freedom at once. For example, a quadcopter remote control unit generally has two control sticks each controlling two degrees of freedom, vertical and yaw on one, roll and pitch on the other. Moving the quadcopter first involves pitching or rolling the quadcopter so that the primary thrust vector is in the desired direction of travel. This greatly reduces the response speed and precision for lateral motion. AI is not limited by four degrees of control and allows for the direct control of all six degrees of freedom at once - this is a recent technological advancement that now enables practical six axis fully actuated drones.
Flight path planning in six degrees of freedom requires a new approach to aerodynamic performance. Traditionally pitch control of an airplane directly affects the lift generated and airplanes are designed to be somewhat passively stable in this regard, so that a person can more reasonably control them. Within the six axis drone control paradigm this is completely changed. Pitch is controlled in an absolute sense and is independent of the other degrees of freedom. The pitch of a six axis drone might be optimized to achieve a desired lift and efficiency when in forward flight, however lifting thrusters directly control total lift and vertical position on top of this. This means that wing lift, which changes in turbulence, does not directly impact vertical position. With fast primary control loops six axis drones can fly through turbulence without being disrupted by it. With high power motors that can accelerate from stopped to full speed in fractions of a second and which have thrust to weight ratios greater than 50:1 it is now possible to vary thrust faster than turbulence, enabling it to effectively be cancelled out in real time. LIDAR direct sensing of incoming atmospheric turbulence would enable this control loop to be even more effective and would help operation with much larger drones with slower accelerating motors - turbulence cancelling can also work for heavy lift drones. Although heavy lift drones with the equivalent of 42kW/kg 550kW electric motors may not need a lot of help in this regard.
Beyond fully actuated:
Fully actuated drones have started to be researched within limited contexts. Six axis drones take this to the next level, integrating and optimizing for high power, flight precision, turbulence cancelling, tool use, agility, aerodynamics, economics, and more. Specifically:
High accuracy sensor systems.
Motor power and fast response needed to cancel out turbulence in real time.
CNC machine like tool use and automatic tool changing, including more accurate localized sensors and fast response actuated end effectors for sub millimeter precision where needed. Force control is also relatively straight forward.
The agility needed to enable high speed and high precision flying close to physical objects including other drones, which is again critical for high air traffic density. This includes the avoidance of control mode transitions - transition to and from forward flight is near instantaneous (no tilt rotors), enabling fast changes in direction and stopping.
The integration of streamlined aerodynamics for high speed, efficiency, and range.
Optimization around economics, specifically capital, operations and maintenance, and energy costs. This includes maximizing utilization rate and minimizing moving parts.
With high precision landing capability six axis drones do not need landing gear, they can also move around with high precision under their own power, avoiding the need for extensive ground infrastructure. They can land directly and precisely on charging connectors, batteries, and tools. If needed they can land directly on dollies for unpowered ground handling.
Six axis drone configurations:
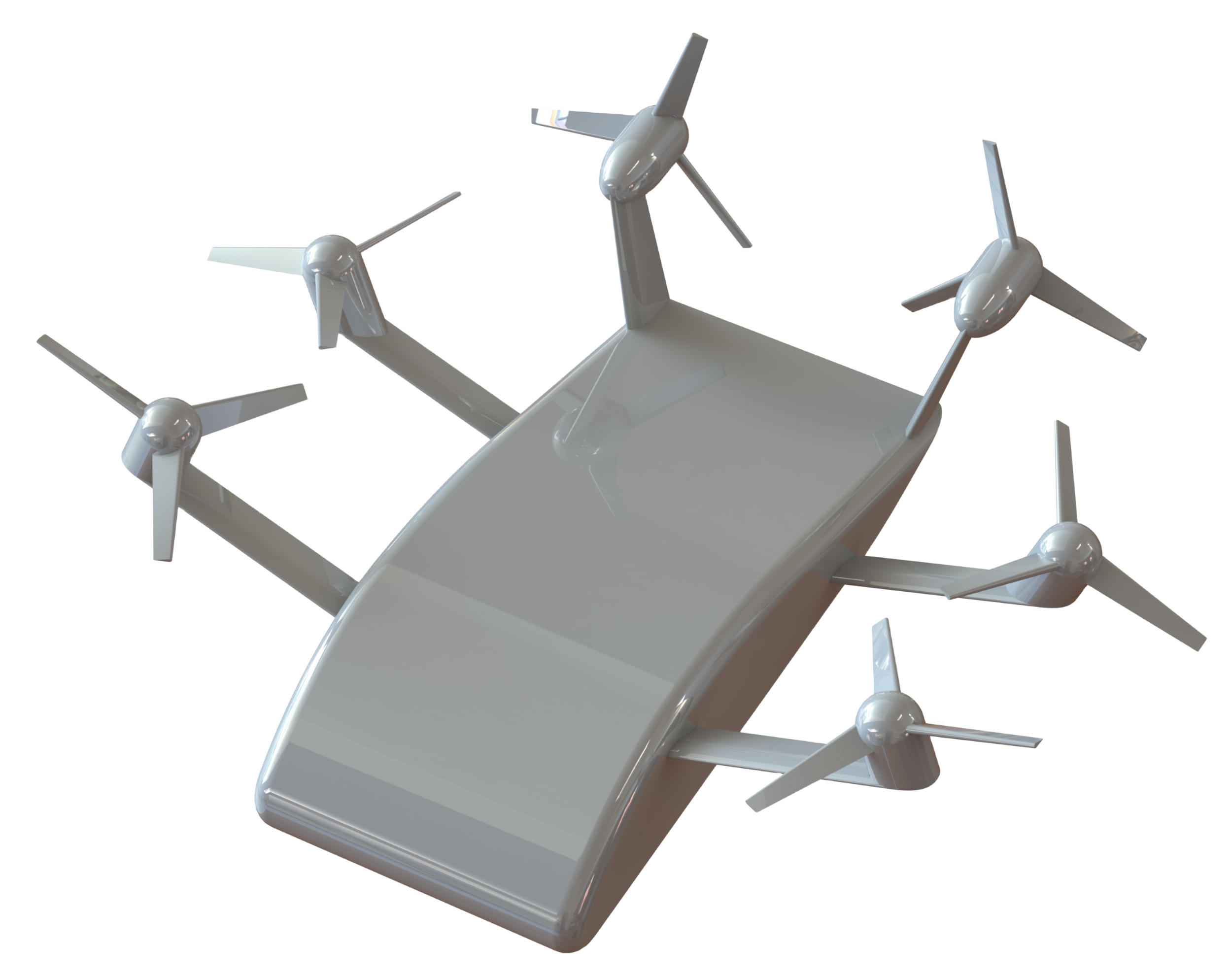
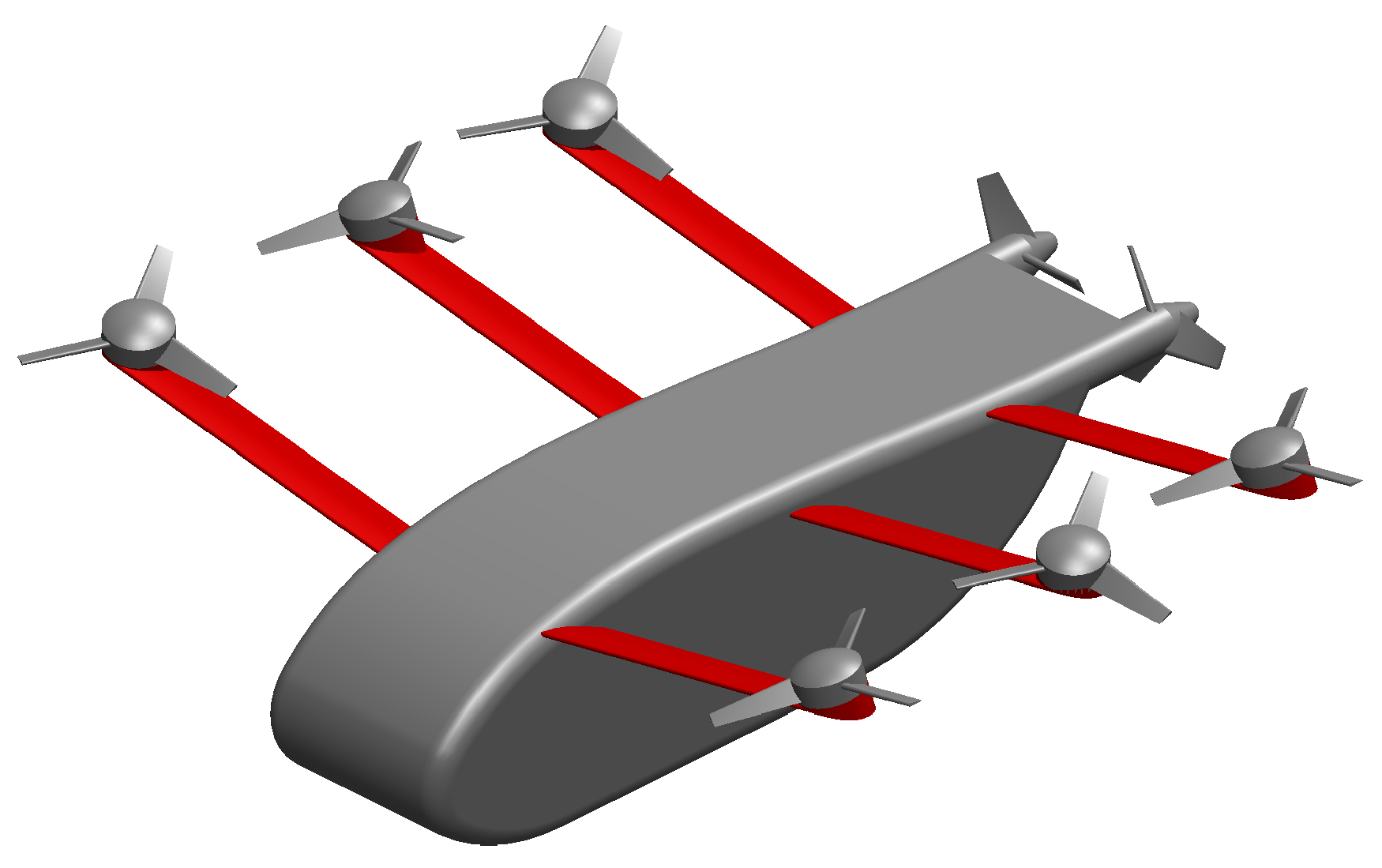
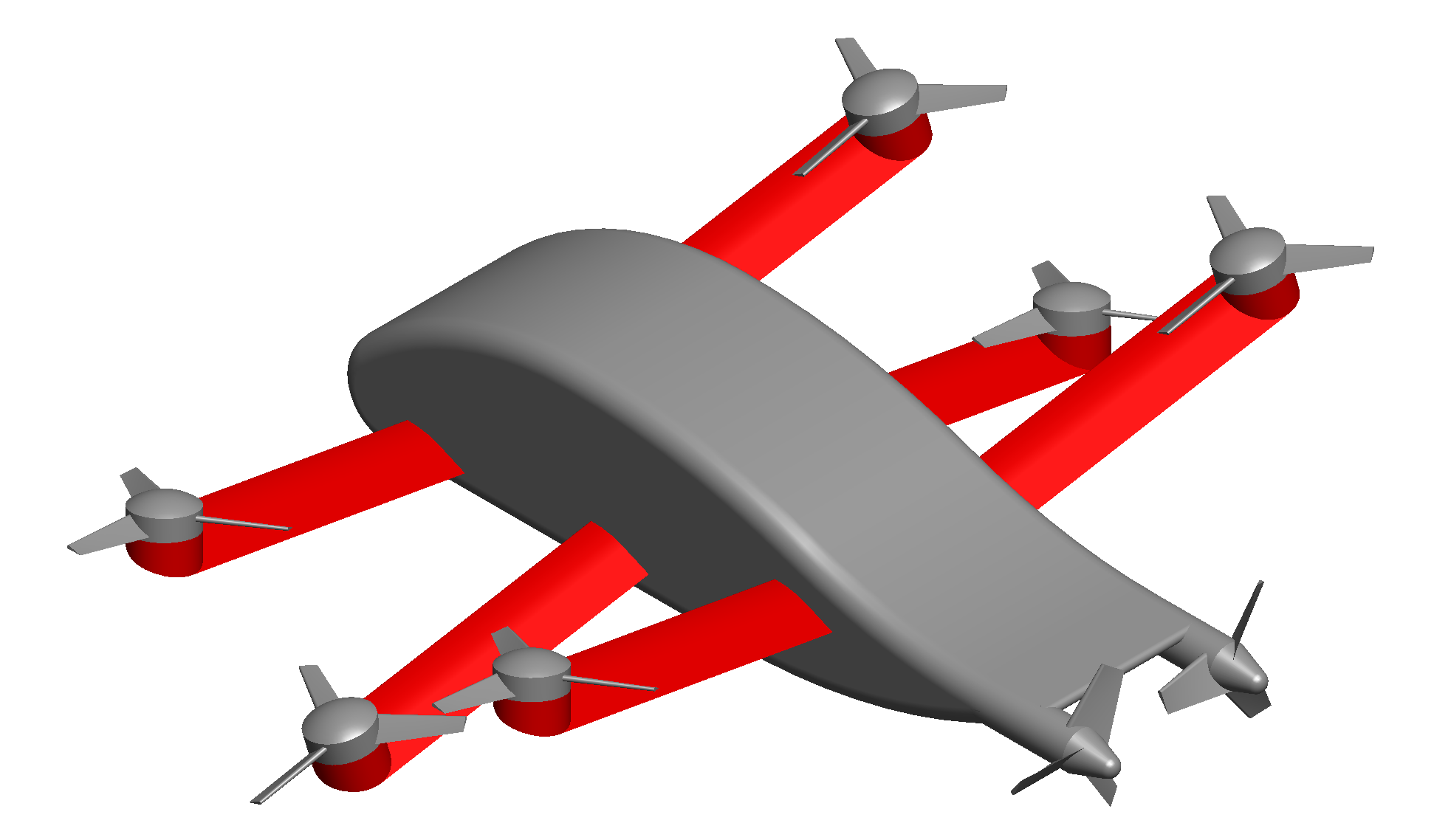
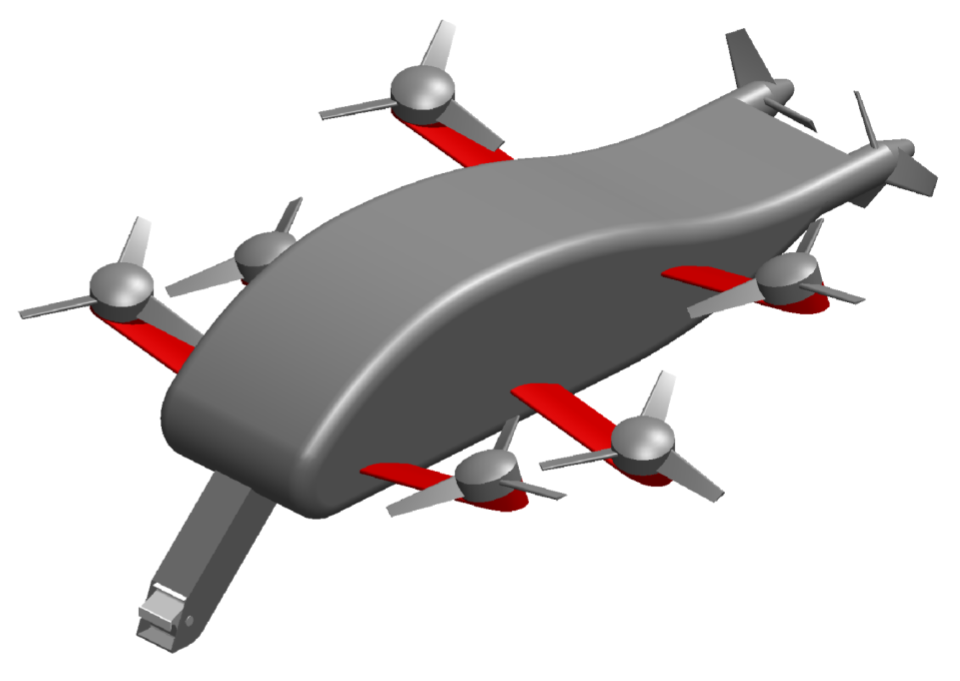
Six axis drone layouts can take many forms, so long as there are independent thrust vectors or every degree of freedom, they may also have more than six propellers enabling over actuated redundant designs. Although a six axis drone can default to an under actuated control configuration if one or two motors fail, for example, become a quadcopter. One primary layout is a lifting body fuselage with wing grid like motor arms that act to fence the lifting body and increase overall lift to drag ratio. Propellers are oriented so as to achieve the desired thrust to weight ratios and flight speeds in different directions. For example, maximum lateral thrust generally does not need to be as great as forward thrust, let alone vertical thrust for lifting. This also raises the desire for some reverse thrust capacity in some directions, fast braking being a good example. In some scenarios some degree of reverse thrust is possible simply by reversing the propeller motor directions. This is only possible for low propeller reverse speeds and thrust levels as propellers are not optimized for reverse operation and there can be severe aeroelastic consequences at higher speeds - destructive oscillations. There is some precedent, water based thrusters and propellers often have some reverse operation capability, typically at reduced performance levels. An extreme braking scenario is still likely to use a pitch up maneuver as the lift propellers have higher thrust capability enabling faster deceleration. Propeller pitch control can also achieve reverse thrust but it is slower and introduces many more moving parts and associated capital and maintenance costs. In order to maximize longevity and minimize maintenance costs it is desirable to minimize moving parts and eliminate wear prone mechanical systems such as gearboxes and servos.
One of the nice things about the lifting body layout is that there is no control mode transition to and from more efficient forward flight - this can happen near instantaneously. A pentacopter (a quadcopter with a pusher propeller) is indicative. This is critical for fast braking and obstacle avoidance, without which dense air traffic situations and close proximity flying are not safe. Once flying at speed the main lifting propellers can be unloaded with lift primarily coming from the lifting body and motor arms, but with the primary lift propellers still providing control, avoiding the need for additional complexity and maintenance prone control surfaces. While this does not maximize efficiency (lift to drag ratio) it does provide reasonable performance at minimal cost and complexity with high robustness. Cost, speed, robustness, and utilization rate are more important metrics than efficiency and range. Economics favor small low-cost and fast short range electric drones that are recharged frequently, covering long distances with many short hops and with small batteries that are cycled often. With ~10mm flying precision, a six axis drone can land directly on charging plugs, avoiding the need for additional robotic charging infrastructure. They can also directly swap out their own batteries using precision flying if preferred. Battery swapping is comparable to automatic tool changing. Turnaround is easily automated and can be fast. For highly localised operations six axis drones can also autonomously connect to a power tether for continuous operation.
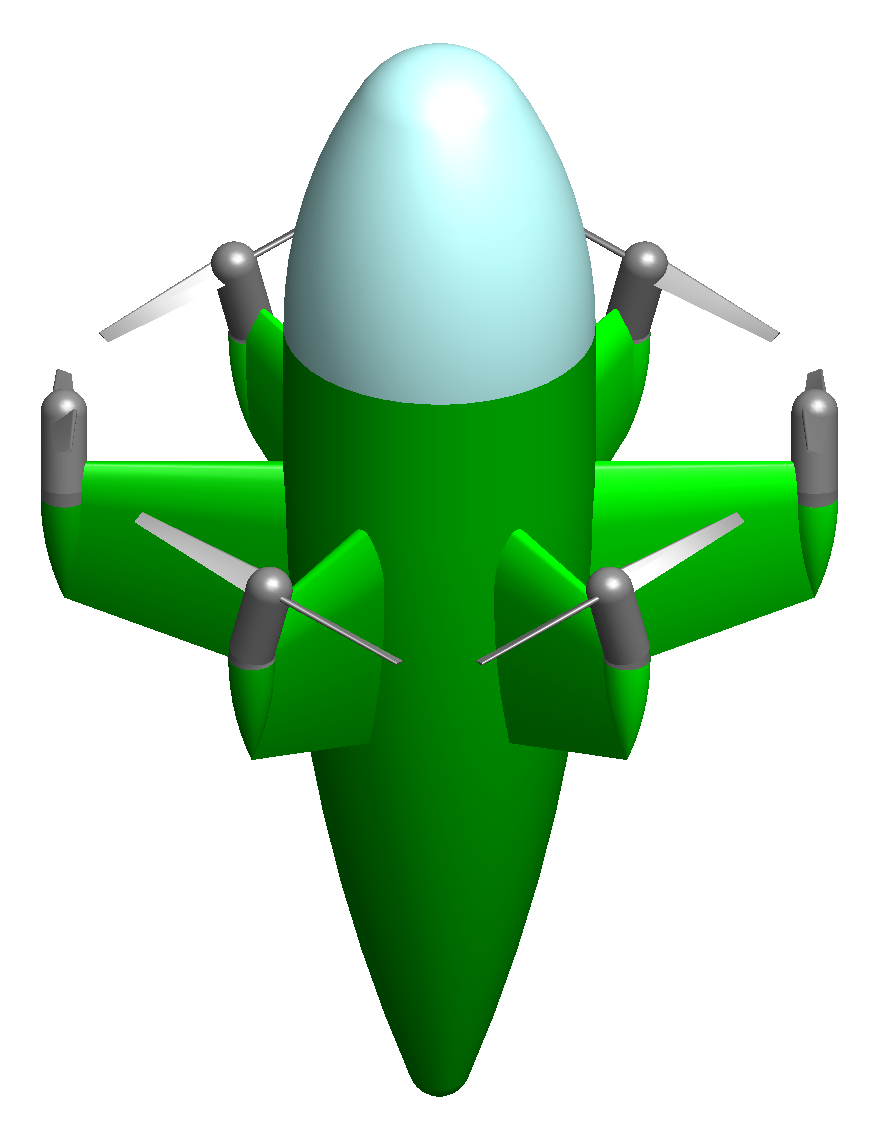
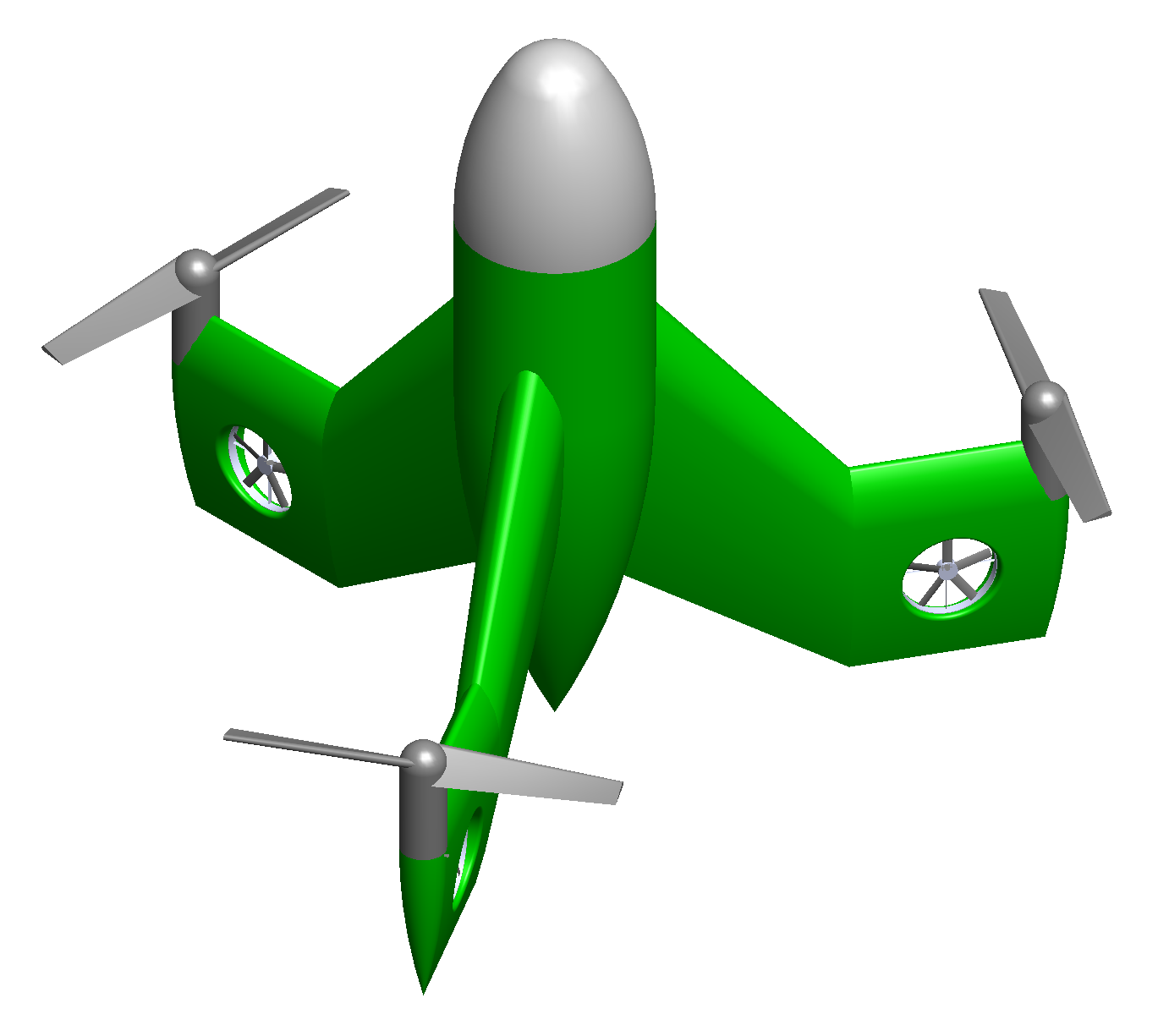
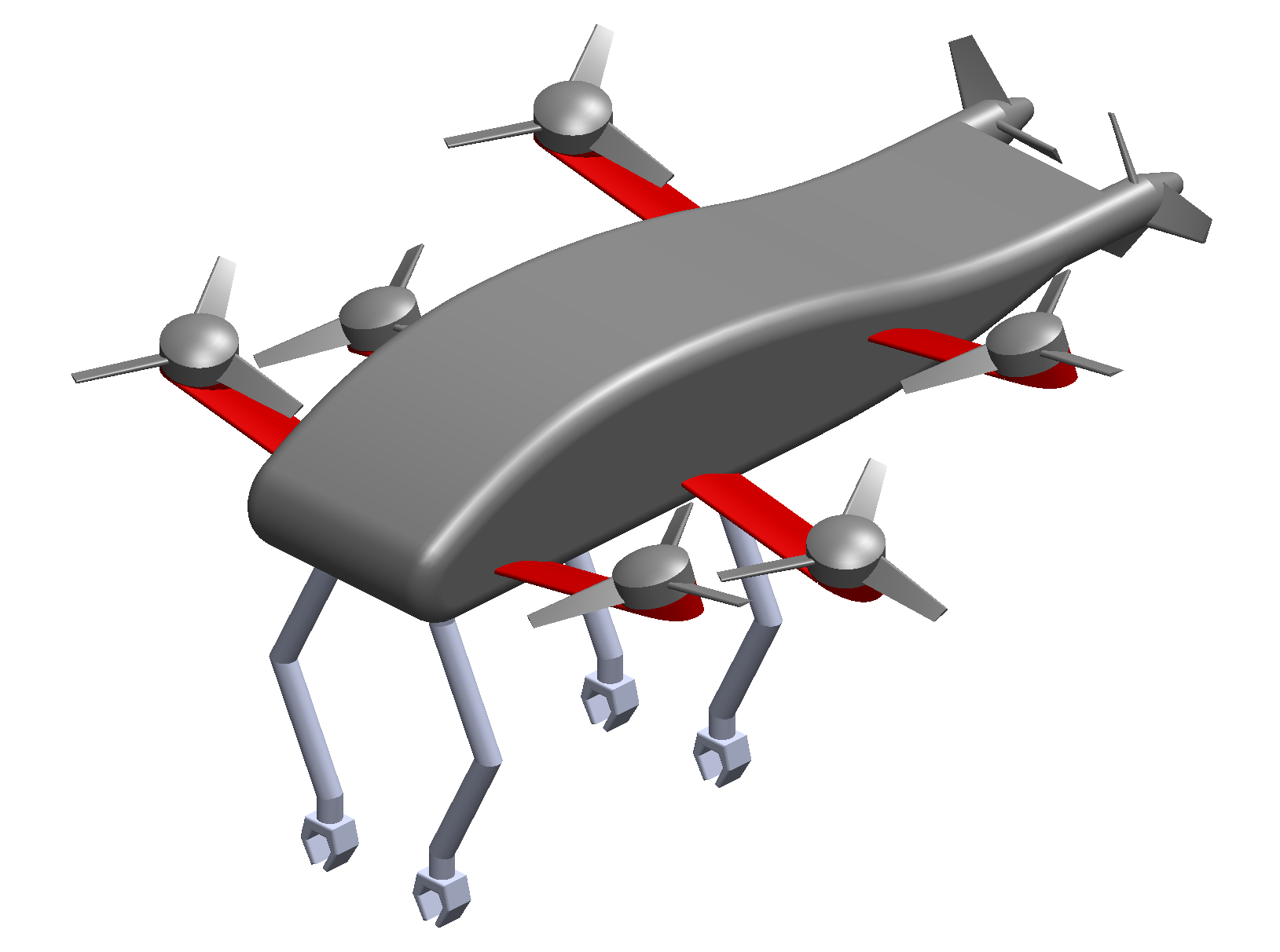
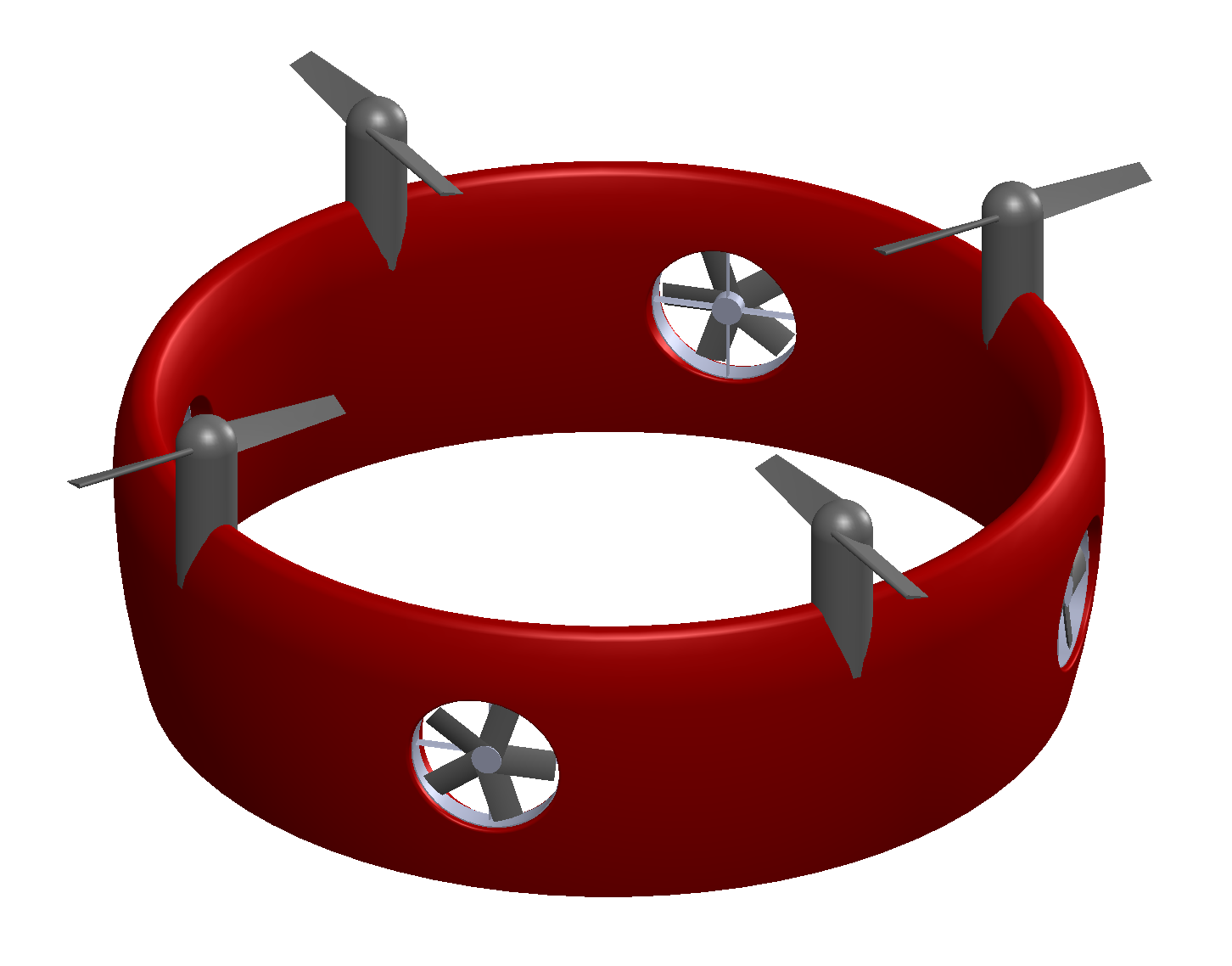
Another primary six axis drone configuration might be termed the tail sitter. For example, a streamlined vertical central fuselage surrounded by six fins with tip mounted propellers in a hexacopter layout. The motors are angled back and forward slightly from vertical so as to achieve thrust vectors that provide direct control over all degrees of freedom. This tail sitter configuration takes off and lands vertically but can pitch over into a horizontal flight orientation, which increases mode transition time and is generally less compatible with sensitive cargo such as people. The tail sitter configuration is more optimal for higher speed operation, the current drone speed record is held by a quadcopter tail sitter of this form (not a fully actuated drone). Many other six axis drone configurations are also possible and most drone types can become fully actuated with the addition of appropriate thrusters. For example, integration of bidirectional thrusters directly into wing surfaces, similar to how a bow thruster might be integrated into a ship, can be one useful and robust approach. Six axis drone modifications can be particularly helpful for takeoff and landing, enabling high precision takeoff and landing in strong winds and turbulence, and even from moving platforms.
Speed:
High speed drones have achieved speeds of up to 300mph and are able to keep up with F1 racing cars. The fastest humanoid robots can maybe achieve ~11mph. Speed directly correlates to productivity and for any activities entailing significant back and forth travel distances drones can greatly outperform humanoid robots. Drones are the mobile robotic exemplar of process intensification - doing more with less. Six axis drones also entail six axis path planning that optimizes speed of travel between two points.
Longevity:
Drone platforms can have as little as four moving parts - long-life direct drive motor and propeller units. In contrast, legs have complicated gearboxes and even direct drive hub motors have tires that frequently wear out. Longevity of a drone platform can exceed 10x that of a walking platform, and distance longevity can be 1,000x. As an example, a passenger jet can last 30 years and 50 million miles while a truck might last 1 million miles. Truck tires might need to be replaced every 0.2 million miles. If a passenger jet was a truck it might need to change tires 250 times over its life. A car might last 0.2 million miles and change tires every 0.05 million miles. Having said this, AI robots are a fast changing industry with early design obsolescence, but this further emphasizes how economically critical high speed and high utilization rates are.
Range:
Electric aircraft, including drones, can have ranges comparable to electric cars and trucks, but are often a bit lower, in part due to high reserve requirements. Aircraft energy use per cargo distance traveled can actually be lower than cars. Humanoid robot walking platforms have much lower range than electric drones. Although range is not necessarily a primary metric. In order to maximize battery utilization and minimize battery costs it is necessary to use high cycle life batteries and recharge them often - many times a day. This means small high power batteries with short range that are autonomously recharged or swapped almost hourly. This also reduces the drone weight and cost and increases the payload fraction, although it also increases the need for recharge stations. With very low-cost colocated solar, energy use is not necessarily a substantial cost driver and the economic optimization can favor less efficient higher power systems.
Payload fraction:
Large aircraft and helicopters have payload fractions as high as 50%, for example, the Chinook helicopter. Drones are likely to have similar payload fractions. FPV racing drones can have maximum thrust to weight ratios greater than 10:1, suggesting that much higher payload fractions are possible if the application favors it. Drone motors can have power densities exceeding 30kW/kg. In contrast, humanoid robots might typically have a payload fraction of around 25%.
Terrain independence:
Drones are not constrained by terrain and operate in three dimensions. They do not need roads, tunnels, bridges, walkways, or ladders, bypassing significant indirect costs. With farming, forestry, and earth moving, they do not get stuck nor do they damage the land over which they pass. They can work on steep hills and in terrain that is otherwise inaccessible. For logistics they can fly direct, they do not have to stop for traffic. They can exploit the third dimension, being able to work from all angles and at all heights, not being limited by a two dimensional floor plan. With underground mining they could efficiently fly up and down through vertical tunnels at high speed. Being terrain independent and being able to use the third dimension opens up many more applications and markets.
Cost:
Drones can achieve cargo transport costs comparable to trains, which is substantially less than trucks and much lower than offroad trucks, including tractors and earth moving machinery. This is primarily due to being fast, autonomous, long-lived, low-maintenance, and having access to ~10x lower energy costs (colocated solar as low as ~$0.02/kWh). Transport costs are typically around a third capital, a third operations and maintenance, and a third energy or fuel, and drones can reduce all of these by around 10x compared to some other transport modes like cars. Battery cycle life might be 5,000 or more, reducing battery costs by ~10x compared to electric cars which might only effectively cycle their batteries weekly and ~ around 500 times over the vehicle’s life. Battery costs of less than $0.01/kWh/cycle are coming, for example, CATL’s Naxtra sodium battery which is claiming greater than 10,000 cycles, 175Wh/kg, and up to 12C charging rates (5 minute charging). A drone of comparable payload capacity to a humanoid robot might average around 2.5kWs in power consumption. With $0.02/kWh colocated solar this equates to $0.05/h in energy cost - energy is not a substantial cost driver. Drones will be capable of autonomous charging and in some cases they might autonomously connect to electrical tethers for continuous operation at a given location.

Scalability:
Drones are scalable from a few grams to tens of metric tons and can be designed to operate collectively in swarms to lift even larger loads. Tethered aircraft approaches can potentially scale beyond 1,000 metric ton payloads and transition between vertical take off and landing and horizontal flight modes. Small and large drones can operate together to perform different tasks, for example, large drones might lift large components while small drones use power tools to fasten them in place. In some circumstances it might be more cost effective to use many more smaller drones instead of a few larger drones as this enables greater standardization and higher production volumes with associated cost reductions.
Tool use:
There will be many different AI drones optimized for many different tasks. Automatic tool changing, like that used on CNC machining centers, will likely be integrated into many of these drones. For example, drones might be able to automatically swap out different robotic arms. This also helps manage the likely much lower longevity and higher maintenance requirements of robotic arms. Power tools and other more specific tools will similarly be able to be swapped in and out. Different farming implements will be able to be swapped in and out in a manner analogous to how a tractor is used and this will extend to construction equipment, earth moving machinery, and so forth. An extensive tool set will need to be developed for AI drones and this will be a long and involved process.


Agility:
Extreme agility and the capacity to land almost anywhere on demand are critical safety features that have generally been under appreciated. To provide context, a Boeing 747 might typically require a vertical separation distance of 1,000 feet, a following separation distance of 3.4 miles, and a lateral separation distance of 0.45 miles. The wakes from large aircraft can be catastrophic to existing aircraft and their ability to take rapid evasive action is very limited. Even if an airplane could brake rapidly to avoid a collision, it would fall out of the sky and crash in doing so. As a consequence aircraft density significantly beyond what is currently achieved is not possible with existing aircraft. This fundamentally prevents drones and aircraft more generally from scaling much beyond their current economic scale. Fully computer controlled centralized air traffic control systems could help but this would be an inherently fragile system that is intolerant to disruption. Six axis control high agility aircraft are needed if we are to achieve substantially greater aircraft and drone densities and economic impact. The current aircraft control and air traffic control paradigm does not scale and this will not change until the six axis control paradigm is embraced.
High agility enables some other important capabilities and has some limitations. For example, six axis drones have much higher agility and fast landing capacity than a helicopter, greatly improving emergency landing options. They are even capable of midair docking maneuvers. High agility also generally entails high power and correspondingly high noise, although electric propulsion tends to be much quieter than internal combustion engine propulsion. With respect to logistics, their extreme agility can be used to mitigate takeoff and landing noise. Electric aircraft generally have a relatively low noise footprint once they are cruising at altitude. Six axis aircraft can ballistically launch themselves out of sound shielding chimneys, tubes, boxes, and the like, and similarly land back inside them. This largely shields the surrounding area from landing and takeoff noise and visual sight. This is not something that would be considered viable with low controllability traditional aircraft but is indicative of what is possible with this new paradigm in aircraft control. Six axis drones that are used inside a manufacturing plant are shielded from the outside world, both from a noise and safety perspective. Outdoor construction or farming six axis drones can operate at a more local level with more centralized air traffic control and be optimized for lower agility and noise if need be. Extreme agility is also likely not needed most of the time, so noise might remain relatively low except in emergency situations.
Manufacturing:
Six axis drones enable a complete reimagining of the production line. They can directly tend automated machinery while also serving as a highly adaptive high speed logistics network in between different machines and assembly processes. The movement of parts and even large assemblies around a factory can be quickly automated and optimized. Six axis drones are not constrained to two dimensional floor plans, they do not even need floors, or stairs, or raised platforms. By exploiting the third dimension, the manufacturing footprint can be much smaller. This reduces distances and further speeds up manufacturing processes. This also allows large assemblies to be worked on from all sides at once, including the top and bottom, with different sized drones optimized for different tasks working together at the same time. With the ability to actively compensate for the turbulence produced by neighboring drones and fly precisely, six axis drones can operate in dense swarms without impacting one another. Six axis drones will enable much faster scaling of production lines and also much faster switching of production lines from old products to new products. Manufacturing is around a $15 trillion dollar per year global industry.
Construction:
Construction six axis drones might operate similarly to manufacturing six axis drones, but they can operate outside and are not constrained by height. They can greatly speed up and reduce the cost of construction. Flying ants might be a useful metaphor. Larger drones will lift heavier components into place, avoiding the need for cranes, while smaller drones might utilize power tools and perform finishing work. Earth moving, concrete laying, cutting, fastening, welding, sanding, and painting are all examples of processes that might be automated with drones. Smaller drones can operate in confined spaces. Construction drones enable the high speed installation of solar farms on unimproved land without roads, starting with the installation of ground screw anchors. This can greatly accelerate the roll out of renewable energy and also dramatically reduce its cost. Construction drones will enable much faster scaling of data centers and the solar farms and energy systems needed to power them. Construction is around a $15 trillion per year global industry.
Farming:
Farming six axis drones work out to be much more energy efficient and lower cost than tractors, including autonomous electric tractors in small robot form. Tractors using offroad tires on muddy fields are far less efficient than trucks on sealed roads and drones can compete directly with trucks on sealed roads. Farming drones can even be economically used for irrigation in some circumstances, using a water tower to provide most of the required energy. Farming six axis drones enable the complete automation of farming using much higher intensity farming techniques. Farming can be optimized at the individual plant level and the full weight of AI can be brought to bear. Average yields might be tripled, as this is the typical ratio between average and record yields. This will also be a lower cost means of increasing output than buying the farm next door. There are many secondary benefits from doing this, including lower cost food production, increased food security, increased food quality, greater climate resilience, reduced water use, increased natural habitat restoration, and so forth. Six axis farming drones can dramatically reduce the farmland needed to feed the world, enabling reforestation, the aversion of a mass extinction, and also stopping global warming. Six axis drones can also adapt to fields of most any shape, size, and slope, significantly improving land utilization. Farming is around a $15 trillion per year global industry.

Forestry:
The terrain independence and autonomous benefits of six axis drones make them particularly useful for forestry and natural habitat management. They can operate anywhere without the expense, constraints, and environmental impact of roads, although some care is needed to keep branches out of propellers. Heli-logging can effectively be automated and made low-cost. They can even deploy their own charging infrastructure if needed. They also enable the direct clean up of forestry slash and removal of deadwood and undergrowth that enables forest fires. The waste biomass harvested can replace all fossil fuels and be used to power backup generators directly. Beyond harvesting logs and waste biomass, drones can also be used for planting, fertilizing, and general nurturing, significantly increasing yields. Including monitoring for and removing disease, infestations, and invasive species before they have a chance to spread. Drones can become the guardians of the forest, and through waste biomass harvesting, they can make it pay, economically incentivising reforestation and biodiversity. The global fossil fuel industry is approaching $10 trillion per year.
Logistics:
Six axis drones can completely revolutionize logistics. Due to the ~10x reduction in capital, operations and maintenance, and energy costs, they can achieve transport costs less than trucks and comparable to trains. At the same time they can provide one day delivery across continents and even in between continents, assuming a suitable chain of recharge stations that they can hop along. Their performance is also largely independent of scale meaning that relatively small drones can operate almost as efficiently as very large drones. This means that most warehouses, and most consolidation and deconsolidation of goods, can be avoided. Six axis drones can also fly closely together in “trains”, potentially following water ways and landing on water if warranted. Supply chain times are reduced from weeks and months to hours and days. Costs are dramatically reduced, but also the time cost of stock is dramatically reduced, greatly reducing working capital requirements. The global logistics market is around $10 trillion per year.
Earth Moving:
A little counter intuitively, six axis drones can revolutionize earth moving and mining. Earth moving machinery is designed for offroad operation with large slow moving tires or tracks that consume a lot of energy to traverse rough and uneven ground. Drones, with their terrain independence, can be far more efficient and lower cost in moving earth around. Small drones can move fast, replacing much larger slower moving equipment. They can also be more easily automated and do not need to be massive in order to offset labor costs. Not needing roads is also a huge benefit, for example, they can dig large mining pits directly. Operating in difficult steep terrain is not a natural impediment and they can even operate underground, where their high speed and ability to move in three dimensions enables more economic layouts and faster throughputs. They do have a significant limitation with respect to blowing up dust. There are a number of approaches for mitigating this including water spraying, long arms, and reduced thrust intensity. More smaller drones, which have lower thrust intensity, can help.
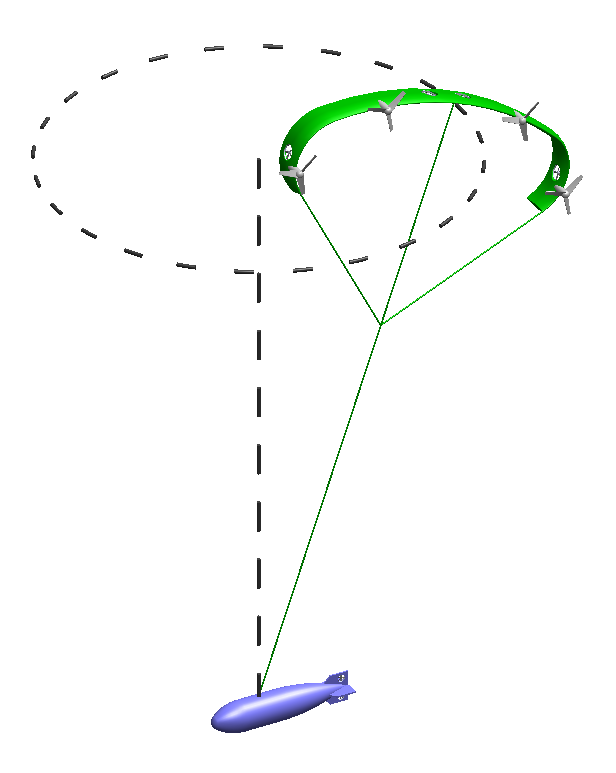
Aerostats:
An interesting application enabled by six axis drones is aerostats, which can be much lower cost with higher data rates than satellites. Six axis drones can fly to high altitude very quickly, in as little as two minutes perhaps averaging over 200mph, and maintain precise station keeping even in extreme weather (precise enough for highly directional high data rate laser communications), but they can only do this for a few minutes before running out of battery. A quick calculation of battery specific energy against the energy needed to climb to high altitude shows that high altitude sprints are possible. Electric aircraft can also operate more effectively than internal combustion engines at higher altitude because they are not as affected by reducing air density. Two or more six axis drones and a charging station enable a drone juggling type situation where one six axis drone is on station at high altitude at all times. This system can be very inexpensive, easily deployed, and very robust. It is much less expensive than a satellite constellation and far more adaptable. It can provide high data rate communications over very large areas, increasing and decreasing in density in response to changing conditions and demand, unlike satellites which are mostly over the ocean at any given time. Six axis drones can takeoff and land from different charging stations, enabling them to self deploy over large areas. In some scenarios they can even self deploy their own charging stations. A six axis drone “satellite constellation” can be less expensive and more adaptable and robust than existing internet infrastructure while being much faster to deploy. This is a market worth billions, and potentially trillions.
Midair docking:
Six axis drones are capable of flight precision at a level that enables midair docking, even in turbulent conditions. This has many implications. This enables the direct and autonomous midair refueling, or recharging, of electric aircraft for effectively unlimited range. Battery “tankers” sprinting to altitude and boosting, recharging, and/or battery swapping to enable continuous flight of passing electric aircraft. It is now well established that electric aircraft can have much lower costs than internal combustion engine aircraft, but that their range limitations can hold them back for longer distance flights. Midair recharging via six axis drones can overcome this limitation and enable a dramatic reduction in long distance air travel costs without compromising speed. Other interesting applications of midair docking include the ability for six axis drones to deploy and return directly from motherships. The ability to continually recharge high altitude aerostats so that they can remain on station permanently. And the ability to directly capture reusable reentry vehicles and return them safely to a launch site, avoiding the need for landing gear and rocket powered landings. Six axis drones have the capability to quickly and dramatically lower the cost of space launch, prompting the relocation and exponential scaling of data centers in orbit.
Military Applications:
The military applications of six axis drones present an Oppenheimer moment. They will completely upend the nature of war and enable total and remote saturation and reconfiguration of battle fields almost at the pixel level. This is the primary reason why we have not previously disclosed this technology. But this lack of awareness is coming to an end and the positive benefits of six axis drones, combined with AI, can dramatically save and improve the world and enable a degree of abundance that can help suppress the desire for war. Intentionally avoiding the mention of offensive applications, two defensive applications that might be mentioned are the use of six axis drones as low-cost drone and missile interceptors for air defense. Noting that six axis drones can be capable of near instant response, extreme precision, extreme agility (with integrated aerodynamics sustained fifty gravity turns are possible), and short duration supersonic speeds if needed. Another application might be the integration of six axis drones with acoustical shot spotter systems and the like. Loitering six axis drones working together could triangulate the origin of gun and artillery fire using acoustics, radar, and other available sensors, and render them inoperable in a matter of seconds. This could largely render artillery, tanks, and firearms obsolete. This application should give some idea of just how comprehensively six axis drones can change the nature of war - far beyond what low-cost drones have already done.
Technology licensing:
Traditional government funding, venture capital, and even big capital technology company funding approaches can not scale fast enough to dominate this technology. There are well over 100 humanoid robot companies, and over 1000 electric aircraft companies. Even if a single company ends up eventually dominating six axis drones there is no reasonable expectation in being able to preselect which one of 100s of possible companies it might be. This suggests that a broad, open, and minimal technology licensing approach is needed that actively encourages new entrants and helps to support the industry. For example, a progressive technology licensing model is being considered where non-commercial and commercial applications below say $1million in annual revenue are free, annual revenue in the $1 million to $100 million range might be subject to a 0.5% licensing fee, and annual revenues above this might be subject to a 1% licensing fee. This is a race to scale and associated cost reduction curves, so small players will be at a substantial disadvantage. With very fast scaling rates first movers will also find it relatively easy to establish effective monopolies that may not be entirely beneficial to the larger industry.